

多机器人系统
多机器人系统

多机器人集群协同控制起源于生物的启发鱼群、蚁群等现象。

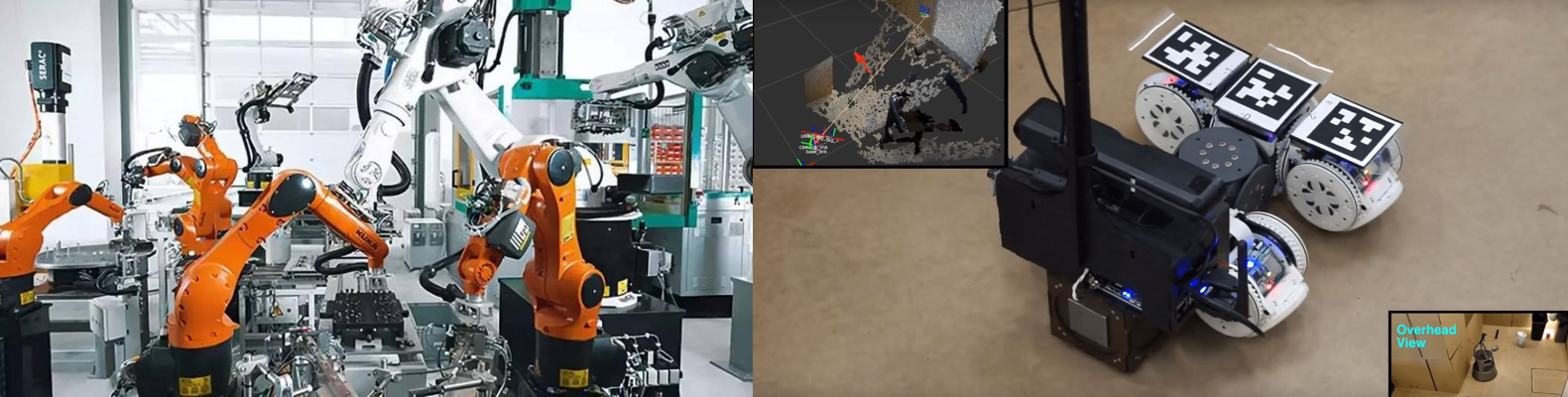
不管是民用还是军事领域,如多无人机编队飞行、地面AGV结构环境集群控制、军用无人机的多机协同侦查等,多机协同控制均取得了广泛应用。

多机协同作业够完成更加复杂的问题,会大幅提高作业效率和可靠性,同时还兼具个体成本低、协同智能灵活、扩展性好等优势,也能够使机器人智能化水平更加接近人类群体水平。
在未来几年,多自主机器人系统研究将成为创新应用新引擎之一。目前国内的多机器人协作共融、群智认知等技术还处于起步阶段,缺乏系统化的研究, 单个技术的突破和优势也并没有转化成大系统层面的核心竞争力。
急需突破关键技术:
- 突破多机器人对复杂环境适应性理解技术
- 突破多机器人多态异构数据处理分析以及智能决策技术
技术优势:
目前研究院在多机器人系统领域的研究上属于国际领先水平,尤其在基于事件触发的多机器人集群控制和基于有向刚性图的多机器人编队控制方面具有突出的技术优势,技术团队拥有完善的人工智能与机器人实验室且承担着多项与多机器人系统相关的重大课题并拥有多项目前在研的国际合作交流项目。
研究目标:
- 实现多机器人自主协同控制

关于我们
研究院简介
产业赋能
团队介绍
科研团队
管理团队
新闻
行业资讯
公司新闻
联系我们
地址: 南京市江宁区秣周东路
12号未来科技城2号楼7层
电话: 025-85091887
邮箱: zzwl@aif2020.com
