

机器人认知决策
机器人认知决策
目前国际上,尤其是美国,现在正在利用其在人工智能领域的技术优势,大力发展模糊语义识别、非结构环境机器视觉、多模态认知决策等技术,并应用于机械臂、轮式、足式机器人的灵巧控制。



中国起步虽晚,但发展较快,国内的一批优秀企业已在机器人学习和人工智能领域开展了大量的研发工作,在应用方面,认知技术已广泛应用于语义识别、视觉识别等领域。

但目前,国内在视觉、自然语言处理等方面的工作仍未能深度融合形成更高的智能决策,传统机器人系统中的多传感器融合还未能和当下新的认知感知技术很好的结合,多机器人的分布式认知决策还处于研究的初级阶段。
技术优势:
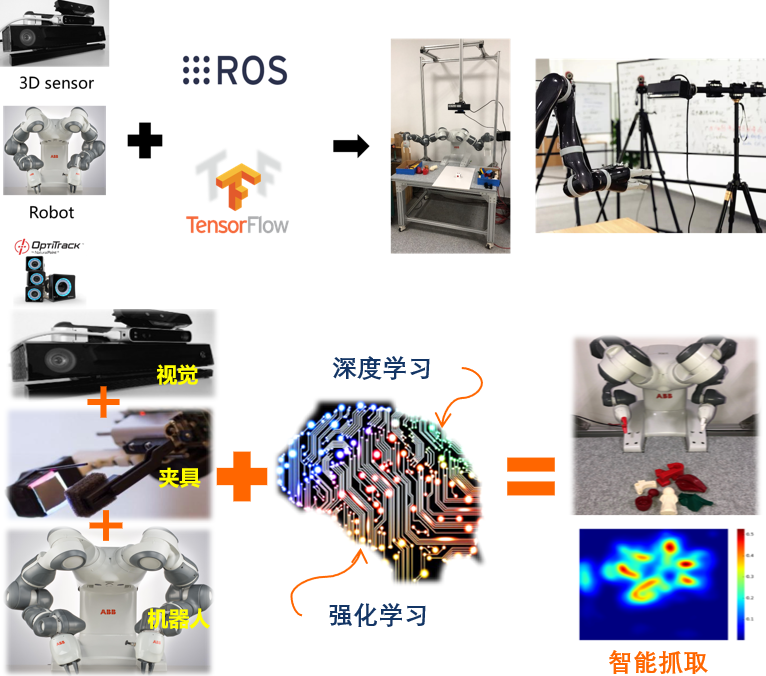
1、 完成了包括固定相机视角ABB的YuMi及相机在手的Kniova机器人认知决策实验平台搭建;
2、 实现了机器人在非结构环境下的智能抓取;
3、 成功率达95%以上,超过目前所有能查询到的相关国内外参考文献的成功率;
4、 基于U-Net设计了一种抓取网络且取得了在Pixel-wise 端到端算法中较好的性能改进;
6、 已在国际顶尖学术会议如IEEE RCAR等发表多篇技术论文。
研究目标:
- 进一步提升机器人在动态环境下认知决策的效率


关于我们
研究院简介
产业赋能
团队介绍
科研团队
管理团队
新闻
行业资讯
公司新闻
联系我们
地址: 南京市江宁区秣周东路
12号未来科技城2号楼7层
电话: 025-85091887
邮箱: zzwl@aif2020.com
